Decisions for Robotics and Games (DeFRAG)
Automation, robotics, artificial intelligence, machine learning, neural networks, big data, smart devices and the Internet of Things. As of late, these buzzwords seem to pop up everywhere from the news headlines to your crazy aunt's latest rant about where the world is heading. However, while there is a lot of uncertainty (and even controversy) surrounding these topics, most people will agree that they are revolutionising the way in which we approach problem solving in the 21st century.


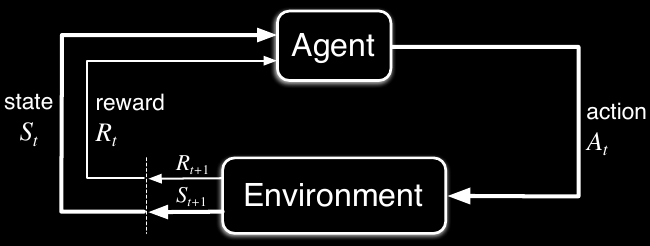
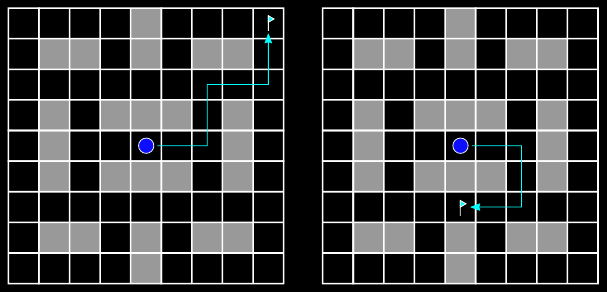
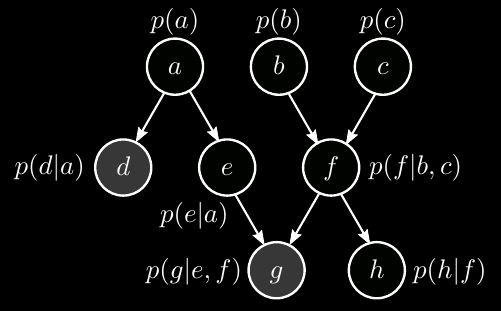
The focus of the DeFRAG research group is on a small subset of these cross-disciplinary fields, where we aim to develop computer-controlled decision-making agents using techniques such as reinforcement learning, optimal control theory, Bayesian optimisation and probabilistic graphical models. The main application areas are robotics (to demonstrate the real-world relevance of our research) and games (which provide a safe and easy-to-simulate testbed). The majority of the group's members are postgraduate students from either the ESL or MediaLab.
Personally, I believe that many of the techniques that we require to solve today's engineering problems already exist, albeit in the broad sense. The trick lies in choosing the most appropriate approach from the myriad of options. Far too often do I still witness the proverbial sledgehammer cracking the square peg in the round hole. Naturally, these generic algorithms still need to be customised, improved upon and integrated, and that is where the potential for interesting research still exists.